Carro a control remoto con la ESP32
Repositorio: https://github.com/Guitlle/Carro-a-control-remoto
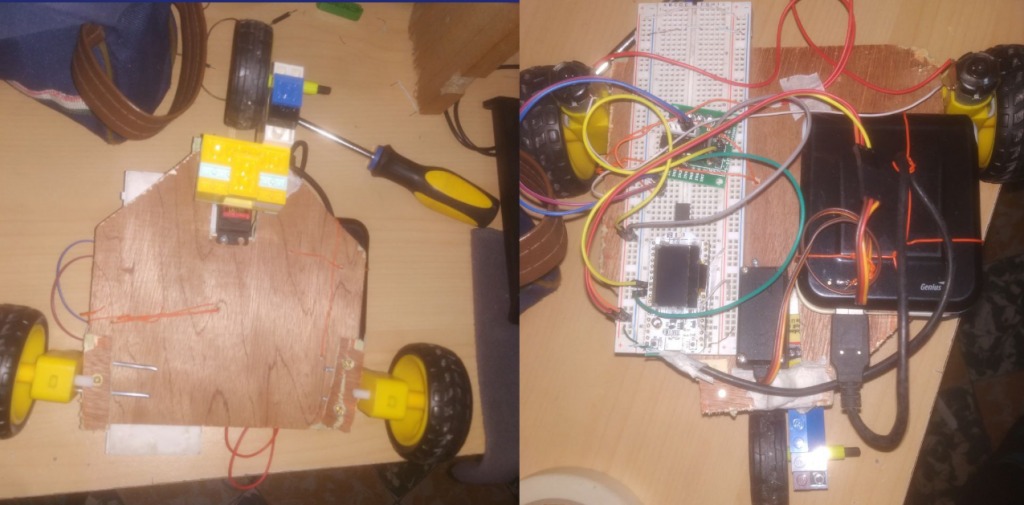
Tenía un par de placas con ESP32 por ahí y me puse a aprender y desempolvar el C++ con este proyecto. Todo muy fácil gracias a las librerías que la comunidad mantiene. La ESP32 se conecta al WiFi, pone un servidor HTTP que muestra una UI simple para controlar el carro desde algún dispositivo conectado a la misma red. Para el hardware utilicé dos motores DC y un servo. El firmware activa dos canales con PWM, uno para los dos motores y el otro para el servo que maneja la dirección de la tercera llanta. El PWM de los motores conecta con un módulo ULN2003AN, que se alimenta de la batería para no hacer pasar mucha corriente por el micro por el pin 33. El servo conecta al pin 32.
TO DO
- Usar un sistema de archivos para el servidor web (probé LittleFS y parece que ya no está soportado por Arduino ESP32)
- Enviar la salida de los logs vía Web para poder debuggear remotamente
- Aprender a actualizar vía OTA
- Agregar un puente H para la reversa
- Averiguar eso de proteger el micro de los picos de voltaje de los motores
- ¿Usar la consola de Esp-IDF? ¿Vía Web?
- …